Hardware Acceleration for Linear Algebra
通用的加速技术
现代机器学习框架可以视为两层:上层是计算图,用于前向推理、自动微分和反向传播;下层是张量线性代数库,其负责底层的张量计算。
Vectorization 向量化: 如果我们要将两个256长度的array相加,一种标量的处理方式是256个元素逐个相加:
1
2
3
4
5
| void add(float* A, float* B, float* C){
for(int i=0; i<256; i++){
C[i] = A[i] + B[i];
}
}
|
但是很多硬件都提供了批量从内存读取、向量运算指令,即优化为如下代码:
1
2
3
4
5
6
7
8
| void vecadd(float* A, float* B, float* C){
for(int i=0; i<64; i++){
float4 a = load_float4(A + i*4);
float4 b = load_float4(B + i*4);
float4 c = add_float4(a, b);
store_float4(C + i*4, c);
}
}
|
这里要求ABC所在的内存块要是按照128 bit对齐的。
Data layout & strides 数据布局&步幅: 在内存中,数据是线性排列的,因此一个矩阵在内存中有两种布局方式:行优先和列优先。现代的语言偏向使用行优先:A[i, j] = Adata[i * A.shape[1] + j
在许多库中,还引入了一种stride格式布局,即在保存张量时,额外保存一个数据,用于标识每个维度上需要移动的步长。在这种情况下,A[i, j] = Adata[i * A.strides[0] + j * A.strides[1]]
这个方案的优点是可以在不用复制数据的情况下实现很多操作:通过改变offset和shape来实现切片;通过交换strides来实现转置;通过插入等于0的stride来实现广播。
缺点是访存操作可能不再连续,因此会把向量化技术变得复杂,很多线性代数操作可能需要先压缩数组。
Parallelization 并行化: 使用openmp可以将计算分配给多个核并行处理:
1
2
3
4
5
6
7
8
9
| void vecadd(float* A, float* B, float* C){
#pragma omp parallel for
for(int i=0; i<64; i++){
float4 a = load_float4(A + i*4);
float4 b = load_float4(B + i*4);
float4 c = add_float4(a, b);
store_float4(C + i*4, c);
}
}
|
样例学习:矩阵乘法
本节讨论如何优化矩阵乘法。
Vanilla matrix multiplication 朴素矩阵乘法: 任务:计算C = dot(A, B.T)。最朴素的想法是使用三重循环完成,即如下代码:
1
2
3
4
5
6
7
8
9
10
| float A[n][n], B[n][n], C[n][n];
for(int i=0; i<n; i++){
for(int j=0; j<n; j++){
c[i][j] = 0;
for(int k=0; k<n; k++){
c[i][j] += A[i][k] * B[j][k];
}
}
}
|
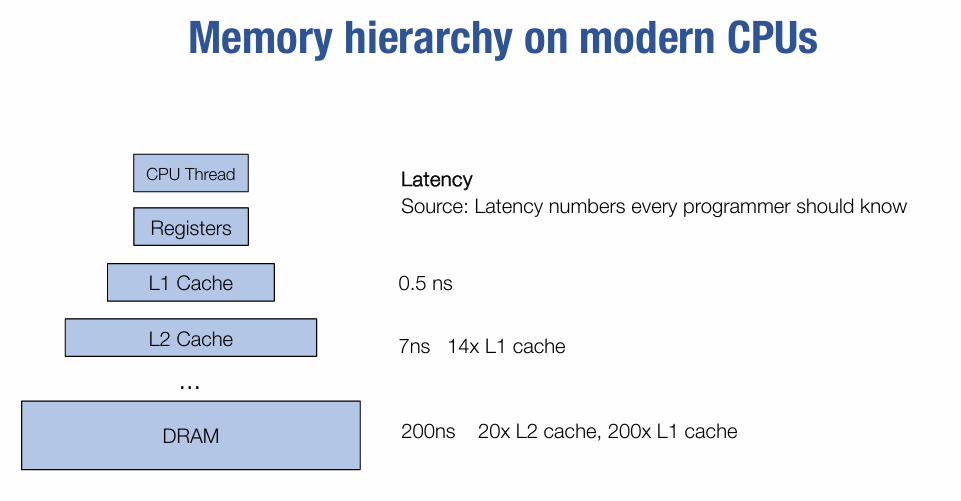
通过优化数据的读取可以显著提升计算速度:
考虑到这一点,我们可以将中间变量保存到寄存器中,即:
1
2
3
4
5
6
7
8
9
10
11
12
13
| dram float A[n][n], B[n][n], C[n][n];
for(int i=0; i<n; i++){
for(int j=0; j<n; j++){
register float c = 0;
for(int k=0; k<n; k++){
register float a = A[i][k];
register float b = B[j][k];
c += a*b;
}
C[i][j] = c;
}
}
|
上述代码中,从读取A、B到寄存器的操作分别进行了$n^3$次,需要3个寄存器来完成该操作。
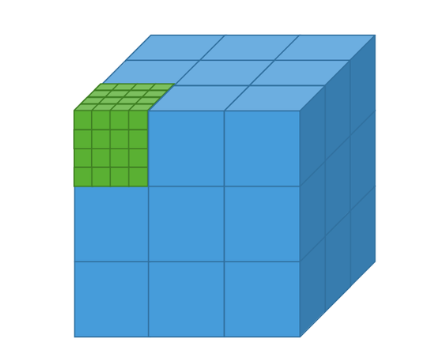
Register tiled matrix multiplication 寄存器分块矩阵乘法: 该方案的思路是将结果进行分块,每次计算其中的一块,即:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
| dram float A[n/v1][n/v3][v1][v3];
dram float B[n/v2][n/v3][v2][v3];
dram float C[n/v1][n/v2][v1][v2];
for (int i = 0; i < n/v1; ++i) {
for (int j = 0; j < n/v2; ++j) {
register float c[v1][v2] = 0;
for (int k = 0; k < n/v3; ++k) {
register float a[v1][v3] = A[i][k];
register float b[v2][v3] = B[j][k];
c += dot(a, b.T);
}
C[i][j] = c;
}
}
|
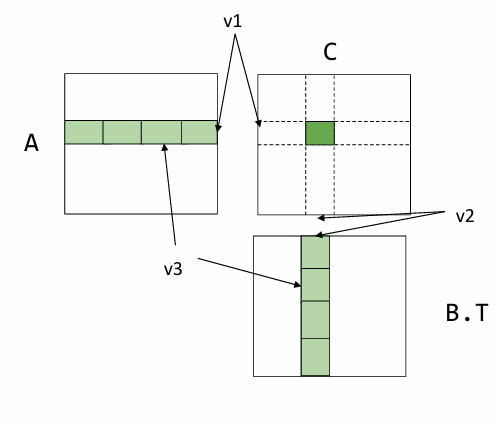
A的数据加载开销是 $n^3/v2$,B的数据加载开销是 $n^3/v1$,A的寄存器开销是v1×v3,B的寄存器开销是v2×v3,C的寄存器开销是v1×v2。注意到v3不影响数据加载的开销,因此可以取v3为1,然后在满足寄存器总数约束的情况下,最大化v1和v2。
之所以能够减小开销是因为在矩阵计算中,元素被重复使用,通过每次计算一个分块的方式,可以保证这个分块内用到的重复数据只要加载一次。
Cache line aware tiling 缓存行感知分块: 前面我们使用寄存器来进行加速,本节我们考虑使用cache来加速。我们的实现代码为:
1
2
3
4
5
6
7
8
9
10
11
12
| dram float A[n/b1][b1][n];
dram float B[n/b2][b2][n];
dram float C[n/b1][n/b2][b1][b2];
for (int i = 0; i < n/b1; ++i) {
l1cache float a[b1][n] = A[i];
for (int j = 0; j < n/b2; ++j) {
l1cache float b[b2][n] = B[j];
C[i][j] = dot(a, b.T); #可进一步使用寄存器分块
}
}
|
上述代码中,A的加载开销是 $n^2$,B的加载开销是 $n^3/b1$。有两个约束,一个是b1 × n + b2 × n <l1 chche size,另一个是为了使用寄存器分块,b1 % v1 == 0, b2 % v2 == 0。
Put it together 将缓存版本的dot运算使用寄存器版本展开,可以得到最终的分块乘法实现:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
| dram float A[n/b1][b1/v1][n][v1];
dram float B[n/b2][b2/v2][n][v2];
for (int i = 0; i < n/b1; ++i) {
l1cache float a[b1/v1][n][v1] = A[i];
for (int j = 0; j < n/b2; ++j) {
l1cache b[b2/v2][n][v2] = B[j];
for (int x = 0; x < b1/v1; ++x)
for (int y = 0; y < b2/v2; ++y) {
register float c[v1][v2] = 0;
for (int k = 0; k < n; ++k) {
register float ar[v1] = a[x][k][:];
register float br[v2] = b[y][k][:];
C += dot(ar, br.T)
}
}
}
}
|
上述代码的数据加载开销是:$l1speed * (n^3 / v2 + n^3/v1) + dramspeed * (n^2 + n^3/b1)$。
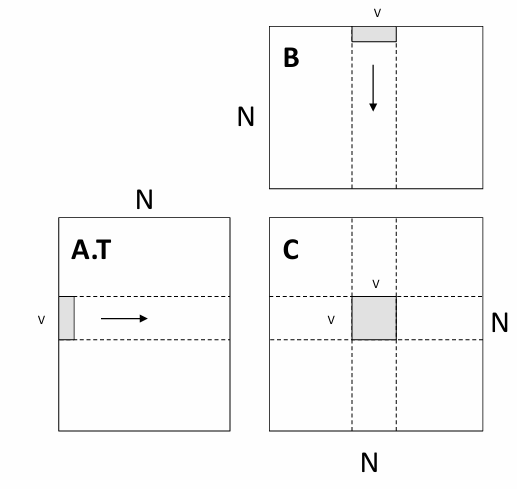
Common reuse patterns: C[i][j] = sum(A[i][k] * B[j][k], axis=k)。A的访问与j无关,将j维度平铺v,可以重用A v次。
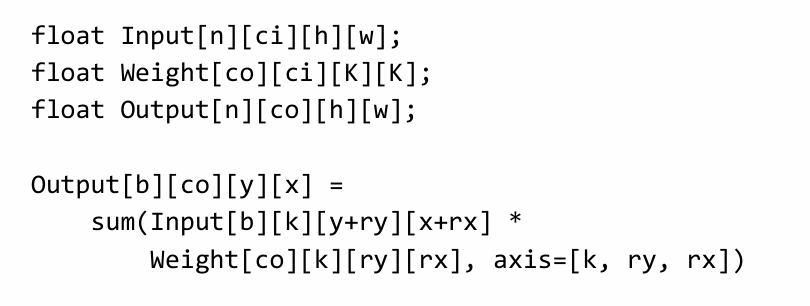
possible reuse pattern in convolution:
GPU Acceleration
GPU编程
在本节我们主要讨论CUDA,尽管还有OpenCL(ARM GPU)、Metal(Apple设备)这些编程模型。
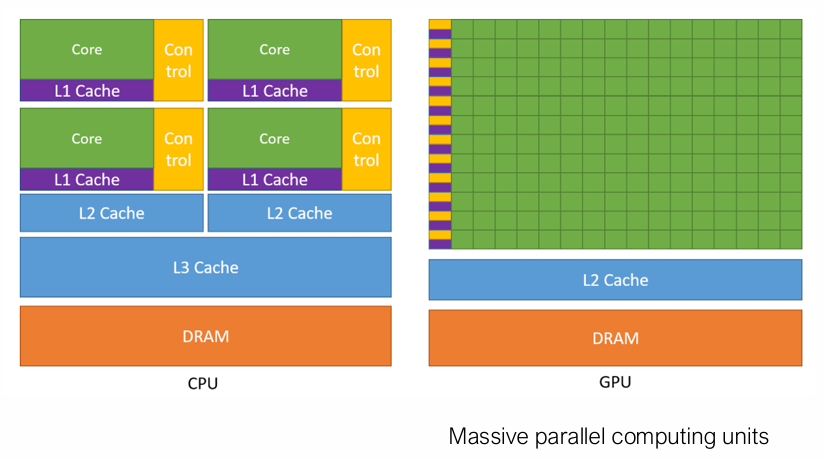
CPU是一种通用处理器,每个核都有独立的控制器,可以灵活地处理不同的任务。GPU擅长处理大量的重复任务(例如在图形渲染中,对每个像素都进行相同的处理),大量的核可以批量执行同一指令。
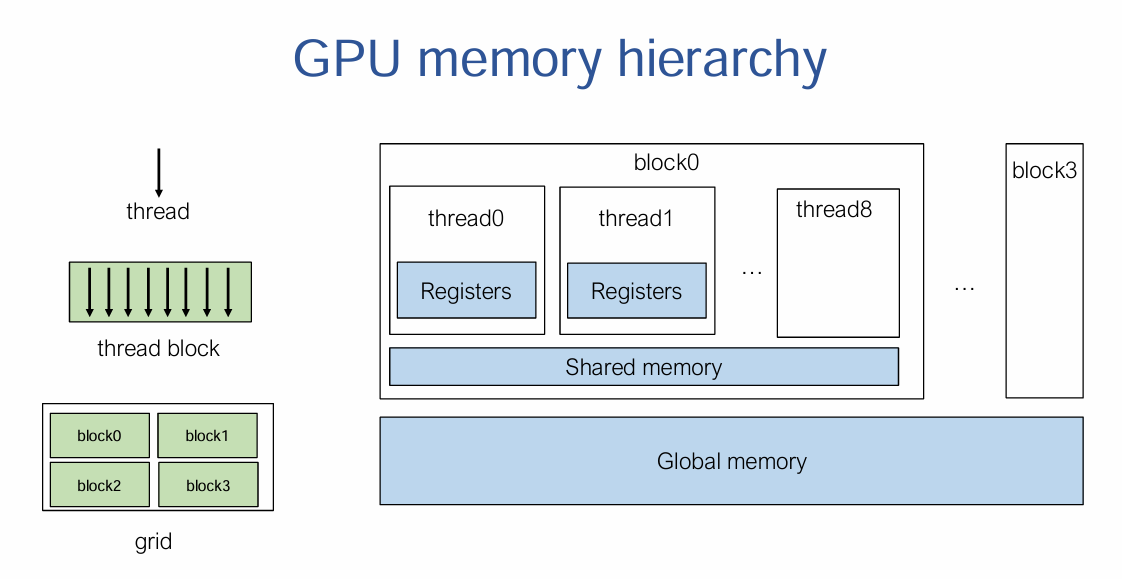
SIMT是NVIDIA CUDA 架构的核心概念。SIMT允许多个线程同时执行相同的指令,但在不同的数据上操作。线程被分组为block,每个block共享内存。block被分组为grid,一个kernel执行一个grid。当线程遇到分支(如 if 语句)时,SIMT 架构会处理分支发散,即不同线程可能执行不同的路径。
例1:CPU和GPU上的向量加法:
1
2
3
4
5
6
7
8
9
10
11
12
| void VecAddCPU(float* A, float *B, float* C, int n) {
for (int i = 0; i < n; ++i) {
C[i] = A[i] + B[i];
}
}
__global__ void VecAddKernel(float* A, float *B, float* C, int n) {
int i = blockDim.x * blockIdx.x + threadIdx.x;
if (i < n) {
C[i] = A[i] + B[i];
}
}
|
blockIdx.x 是线程块的索引blockDim.x 是每个线程块中的线程数threadIdx.x 是线程在线程块中的索引
每个线程计算向量 a 和 b 的一个元素之和,并将结果存储在向量 c 中。如果数据之间的依赖关系较强的话,可能就没办法并行。
为了执行上述GPU的向量加法,在主机端要执行以下内容:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
| void VecAddCUDA(float *Acpu, float *Bcpu, float *Ccpu, int n) {
float *dA, *dB, *dC;
cudaMalloc(&dA, n * sizeof(float));
cudaMalloc(&dB, n * sizeof(float));
cudaMalloc(&dC, n * sizeof(float));
cudaMemcpy(dA, Acpu, n * sizeof(float), cudaMemcpyHostToDevice);
cudaMemcpy(dB, Bcpu, n * sizeof(float), cudaMemcpyHostToDevice);
int threads_per_block = 512;
int nblocks = (n + threads_per_block - 1) / threads_per_block;
VecAddKernel<<<nblocks, threads_per_block>>>(dA, dB, dC, n);
cudaMemcpy(Ccpu, dC, n * sizeof(float), cudaMemcpyDeviceToHost);
cudaFree(dA);
cudaFree(dB);
cudaFree(dC);
}
|
首先在GPU上分配显存,将两个加数拷贝到设备中,根据数据的规模确定要启用的block数量,然后执行GPU代码,最后将结果拷贝回CPU内存,释放相应显存。
内存拷贝非常耗时,因此我们希望将数据一直保留在GPU显存中进行计算,而非在CPU和GPU之间频繁地拷贝。
例2:window sum是一种权重全为1的卷积,可以这么写:
1
2
3
4
5
6
7
8
9
10
11
12
| #define RADIUS 2
__global__ void WindowSumSimpleKernel(float* A, float *B, int n) {
int out_idx = blockDim.x * blockIdx.x + threadIdx.x;
if (out_idx < n) {
float sum = 0;
for (int dx = -RADIUS; dx <= RADIUS; ++dx) {
sum += A[dx + out_idx + RADIUS];
}
B[out_idx] = sum;
}
}
|
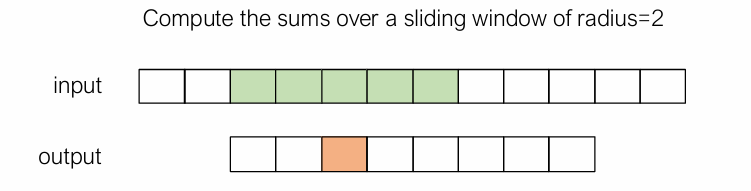
但这个算法并不高效,会重复访问数据。这时候可以引入共享内存进行优化,将一个block内会用到的数据全部读取到共享内存中。数据加载的任务可以分给每个线程并行完成。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
| __global__ void WindowSumSharedKernel(float* A, float* B, int n) {
__shared__ float temp[THREADS_PER_BLOCK + 2 * RADIUS];
int base = blockDim.x * blockIdx.x;
int out_idx = base + threadIdx.x;
if (base + threadIdx.x < n) {
temp[threadIdx.x] = A[base + threadIdx.x];
}
if (threadIdx.x < 2 * RADIUS && base + THREADS_PER_BLOCK + threadIdx.x < n) {
temp[threadIdx.x + THREADS_PER_BLOCK] = A[base + THREADS_PER_BLOCK + threadIdx.x];
}
__syncthreads();
if (out_idx < n) {
float sum = 0;
for (int dx = -RADIUS; dx <= RADIUS; ++dx) {
sum += temp[threadIdx.x + dx + RADIUS];
}
B[out_idx] = sum;
}
}
|
通过__syncthreads同步,确保所有线程都将数据加载完毕。
样例学习:GPU上的矩阵乘
最简单的版本:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| __global__ void mm(const float* a, const float* b, float* out, uint32_t M, uint32_t N, uint32_t P) {
int row = blockIdx.x * blockDim.x + threadIdx.x;
int col = blockIdx.y * blockDim.y + threadIdx.y;
float sum = 0.0f;
if (row < M && col < P) {
for (int k = 0; k < N; ++k) {
sum += a[row * N + k] * b[k * P + col];
}
out[row * P + col] = sum;
}
}
void Matmul(const CudaArray& a, const CudaArray& b, CudaArray* out, uint32_t M, uint32_t N, uint32_t P) {
dim3 grid_dim = dim3((M + TILE - 1) / TILE, (P + TILE - 1) / TILE, 1);
dim3 block_dim = dim3(4, 4, 1);
MatmulKernel<<<grid_dim, block_dim>>>(a.ptr, b.ptr, out->ptr, M, N, P);
}
|
从线程的细粒度来说,我们可以在GPU上实现一个寄存器分块版本的矩阵乘法:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
| __global__ void mm(float A[N][N], float B[N][N], float C[N][N]) {
int ybase = blockIdx.y * blockDim.y + threadIdx.y;
int xbase = blockIdx.x * blockDim.x + threadIdx.x;
float c[V][V] = {0};
float a[V], b[V];
for (int k = 0; k < N; ++k) {
a[:] = A[k, ybase*V : ybase*V + V];
b[:] = B[k, xbase*V : xbase*V + V];
for (int y = 0; y < V; ++y) {
for (int x = 0; x < V; ++x) {
c[y][x] += a[y] * b[x];
}
}
}
C[ybase * V : ybase * V + V, xbase * V : xbase * V + V] = c[:,:];
}
|
每个线程负责计算一个分块的结果。
还可以将计算一块的任务交给一个block,这样就可以使用共享内存技术由block内的线程共同加载要用到的数据。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
| __global__ void mm(float A[N][N], float B[N][N], float C[N][N]) {
__shared__ float sA[S][L], sB[S][L];
float c[V][V] = {0};
float a[V], b[V];
int yblock = blockIdx.y;
int xblock = blockIdx.x;
for (int ko = 0; ko < N; ko += S) {
__syncthreads();
// needs to be implemented by thread cooperative fetching
sA[:, :] = A[ko + S, yblock * L : yblock * L + L];
sB[:, :] = B[ko + S, xblock * L : xblock * L + L];
__syncthreads();
for (int ki = 0; ki < S; ++ki) {
a[:] = sA[ki, threadIdx.x * V + V];
b[:] = sB[ki, threadIdx.x * V + V];
for (int y = 0; y < V; ++y) {
for (int x = 0; x < V; ++x) {
c[y][x] += a[y] * b[x];
}
}
}
}
int ybase = blockIdx.y * blockDim.y + threadIdx.y;
int xbase = blockIdx.x * blockDim.x + threadIdx.x;
C[ybase * V : ybase * V + V, xbase * V : xbase * V + V] = c[:, :];
}
|
上述代码从全部内存到共享内存的加载过程被复用L次(计算每个分块矩阵都要读取L次AB的行列向量),从共享内存到寄存器被复用V次(在分块矩阵中按照长度V进行了二次分块计算) 各线程读取数据到共享内存的过程为(以
各线程读取数据到共享内存的过程为(以sA[:, :] = A[k : k + S, yblock * L : yblock * L + L]为例):
1
2
3
4
5
6
7
| int nthreads = blockDim.y * blockDim.x;
int tid = threadIdx.y * blockDim.x + threadIdx.x;
for(int j = 0; j < L * S / nthreads; ++j) {
int y = (j * nthreads + tid) / L;
int x = (j * nthreads + tid) % L;
s[y, x] = A[k + y, yblock * L + x];
}
|
更多GPU优化技术
- Global memory continuous read(尽量使内存访问是连续的)
- Shared memory bank conflict(共享内存被分成多个“银行”,每个银行可以同时处理一个访问请求。如果多个线程同时访问同一个银行的不同地址,就会发生冲突,导致访问延迟)
- Software pipelining(通过重排指令顺序,使得计算和内存访问可以重叠进行)
- Warp level optimizations (warp 是一个更小的执行单元,通常包含 32 个线程)
- Tensor Core(NVIDIA GPU 中专门用于加速矩阵乘法和深度学习计算的硬件单元)
Training Large Models
mlsys的三个元素:data,model,compute
节省内存
节省内存消耗,在一台设备上fit更大的model。GPU的全局内存(global memory)大小是bottleneck。
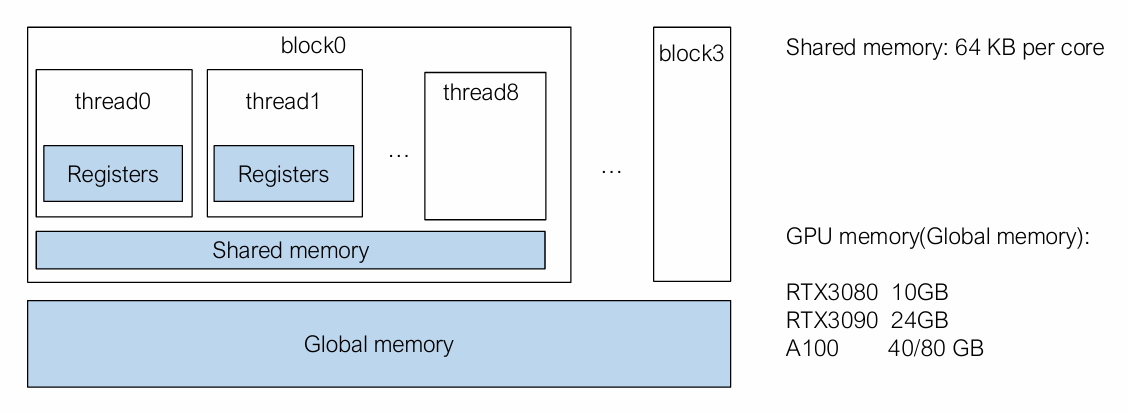
内存消耗的来源包括:模型权重、优化器状态、中间激活层的输出值。
对于推理来说,保存激活层状态只需要两块buffer(O(1)),分别保存输入和输出,下一层的输入就是上一层的输出。
对于训练而言,由于计算每一层的梯度时都用到了该层的输入,所以每个激活层都要一块buffer,空间复杂度O(n)。
checkpoint技术节省内存:每隔一个激活层才保存该层的值,在反向传播时,如果用到未保存的隐藏层,则通过上一个隐藏层计算出该层的值。以时间换空间。对于一个n层的网络,每隔k个隐藏层保存一次结果,空间复杂度为O(n/k)+O(k),当$k=\sqrt{n}$时取到最小值。
模型并行(Model parallel training)
是将计算图进行划分,并分配给不同的worker进行执行,通过network在worker间传递数据。
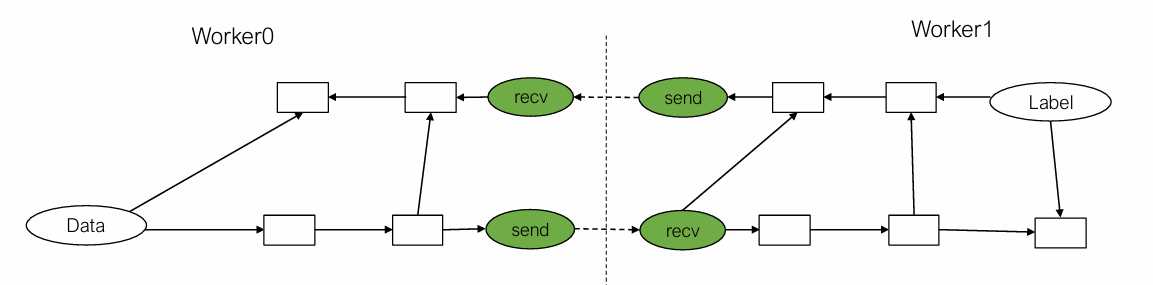
当worker1计算来自worker0的数据时,worker0可以并行计算下一个minibatch的数据。
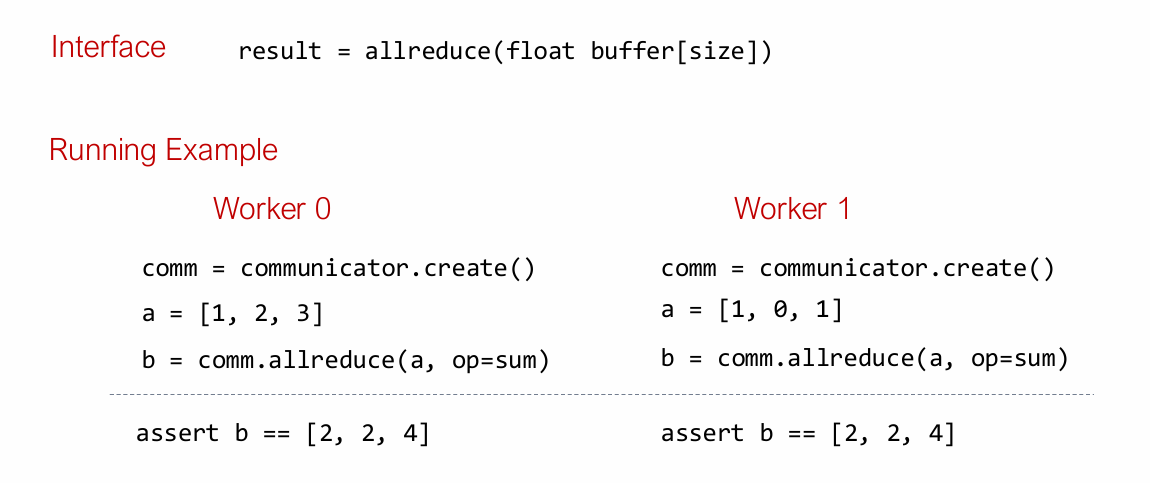
数据并行(Data parallel training)

让k个worker分别访问minibatch的B / k个部分,并运行梯度计算,然后将所有梯度加在一起。allreduce抽象进行汇总:
我们还可以将参数使用专门的参数服务器保存,需要访问或者更新参数时调用相应API即可。参数服务器的好处是其不需要等待所有的worker都计算结束再更新。
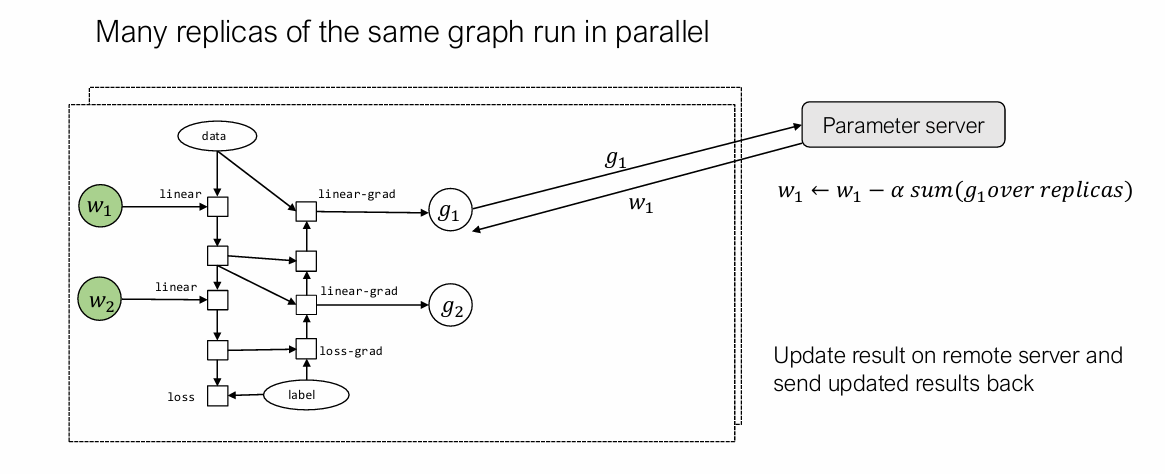
通信与计算的平衡(overlap):
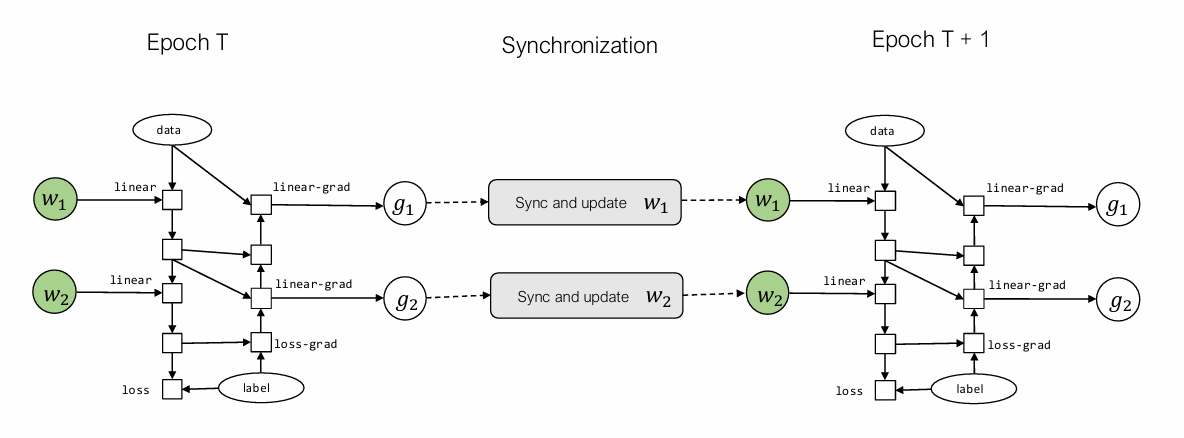
$w_2$没算完也没关系,$w_1$算完可以继续算下一个epoch的。
(Model Deployment 和 Machine learning compilation就不记了)
参考
- 《CMU 10-414 deep learning system》学习笔记
- 深度学习系统作业 - 知乎 (zhihu.com)